Вместо промежуточного вступления
На самом деле сейчас наиболее доступны материалы по истории шагающих механизмов. Удивительно, но она существует. Настоящее скрыто под завесой тайны. Лишь иногда проскакивают новости, которые могут настораживать. Например, майки с датчиками температуры (электроника вживлена в ткань, следовательно, ее можно вживить в любой полимерный материал), робот учится кунг-фу, самообучающиеся игрушки роботы-собаки и так далее. Будущее шагающих механизмов мы уже знаем из фантастики. Все предсказания сбываются с точностью как у Жюля Верна.
Что удивительно, если бы технологии шагающих механизмов развивались чуточку быстрее, то мы бы совершенно по-другому представляли себе сейчас луноход. Сейчас же мы приступим непосредственно к андроидам, будущим человекоподобным киборгам.
Двуногие андроиды
Двуногие машины имеют не менее богатую историю, по сравнению с другими шагающими механизмами. Но наш исторический обзор мы начнем с 1964 года, когда ленинградскими учеными была создана кинематическая модель Чебышева с двумя ногами (рис. 1).
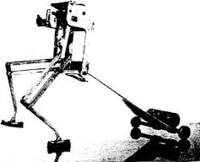 |
| Рис.1. Кинематическая модель Чебышева |
Советские ученые внесли не очень большую лепту в историю создания двуногих машин. Так, в 1990 году в Москве профессором Формальским и доктором Ленским была создана модель двуногого робота, очень похожего внешне на данную кинематическую модель. Но такого прогресса в данной сфере разработок, как в Японии, в СССР, конечно, не было.
В 1969 году Иширо Като (Япония) показал миру антропоморфный двуногий механизм WAP-1 (рис. 2).
 |
| Рис.2. WAP-1 с искусственными резиновыми мускулами |
Интересным в данной разработке было то, что мышцы сделаны из резины или каучука и устройство приводилось в движение с помощью пневматики за счет воздействия на "искусственные мускулы". Это очень новаторская идея, которая совмещает в себе и простоту, и гениальность. Иширо Като работал при поддержке специальной исследовательской лаборатории гуманоидов (Humanoid Research Laboratory) при Waseda University (Токио). Интересен сам факт существования таковой в конце 60-х, в то время как для Японии это были не лучшие годы. И нужно сказать, результат очевиден, поскольку за Иширо Като стоит большая часть истории современных двуногих машин.
Уже в 1970 году появилась усовершенствованная модель WAP-2 (рис. 3).
 |
| Рис. 3. WAP-2 с датчиками давления под подошвами |
В ней отсутствовали резиновые мускулы, были разработаны специальные управляемые приводы, при этом под подошвы робота встраивались специальные датчики давления, что позволяло осуществить автоматический контроль положения.
В 1971 году состоялось сразу две премьеры, а именно - WAP-3 (рис.4) и WL-1.
 |
| Рис. 4. WAP-3 может подниматься и спускаться по лестнице |
Обе они равноценны по значимости в истории шагающих механизмов. WAP-3 - это продолжение модели WAP-2, но, в отличие от предшественника, он имел спереди центр тяжести, что позволяло наклоняться и перемещаться не только по ровной поверхности, но и спускаться/подниматься, например, по лестнице. Таким образом, это был первый в мире робот, способный перемещаться не только по горизонтальной плоскости. WL-1 - это модель, управляемая мини-компьютером. Она так же, как и WAP-3, имела центр тяжести, расположенный спереди, но при этом могла менять направления ходьбы, что стало возможным за счет внедрения мини-компьютера.
В 1972 году в МГУ была разработана модель под именем "Рикша" (рис. 5).
 |
| Рис. 5. Советский "Рикша" |
В движение она приводилась с помощью двух ног, но между тем имелось еще и четыре колеса.
В 1973 году в Японии (Иширо Като) стартовал проект WABOT-1 (рис. 6), целью которого было создание полностью функционирующего антропоморфного робота.
 |
| Рис. 6. WABOT-1 - первый андроид, который может видеть, слышать и говорить |
Помимо систем контроля управления, в WABOT-1 были встроены видео- и звуковая системы, которые позволяли оценивать расстояние до объектов и направление к ним. Таким образом, это одна из первых роботов-машин, которая имела "глаза" и "уши". Ко всему прочему WABOT-1 имел внешние рецепторы и звуковоспроизводящую систему (умел говорить). То есть, первый андроид был создан в 1973 году.
В 1980 году Иширо Като разработал WL-9DR, управляемый с помощью 16-разрядного мини-компьютера. При этом если в предыдущих моделях "обдумывание" механизмом каждого шага составляло более чем 45 секунд, то в варианте WL-9DR на один шаг тратилось всего десять секунд. Роботы учатся ходить! И скорость у них измеряется пока в странной величине - сек/шаг.
И в 1983 году появилась модель WL-10 и на "обдумывание" шага тратилось около четырех с половиной секунд (если быть точным - 4,4 сек/шаг). В модели WL-10R применялись новые типы серво-механизмов и материалов. Значительно добавлена степень свободы у членов робота. WL-10R мог свободно поворачиваться, ходить вперед и назад. Теперь стали насущны еще одни параметры для шагающих механизмов, а именно - степени свободы.
1984 год. Команда ученых токийского университета создает двуногого робота с восемью степенями свободы. При этом данный робот уже имел автономное питание от источника постоянного тока.
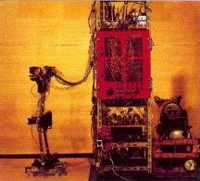
В 1985 году Иширо Като создает WL-10RD. Теперь робот затрачивает от 2 до 5 секунд на каждый шаг. При совместной работе с Hitachi Ltd. модель WL-10R находит свое продолжение и в другом варианте - WHL-11 (Waseda Hitachi Leg-11). В WHL-11 (рис. 7) был добавлен компьютер и гидравлический привод.
 |
| Рис. 7. WHL-11. Разработка совместно с Hitachi Ltd |
Как мы понимаем, роботы уже научились ходить, говорить... А вот главным событием было появление WASUBOT (аббревиатура от WAseda SUmitomo roBOT) от того же Иширо Като. WASUBOT - это робот-музыкант, который играет на пианино. Фотография, представленная на рисунке 8, обошла весь мир. Лично я ее помню из старых научных журналов.
 |
| Рис. 8. WASUBOT - робот-пианист |
С тех пор прошло много времени. Роботы научились думать, ходить, говорить, видеть, слышать и даже самообучаться. Думаю, многие из вас читали новость о том, что в Китае робота обучают кун-фу. При этом дополнительно при таком "обучении" можно усовершенствовать четкость движений механизмов и приводов.
Современные компьютерные технологии позволяют улучшить системы управления. Современные химики создают отличные полимерные материалы, которые могут являться заменителем кожи. При этом в такие материалы можно встраивать электронику.
Общий вывод
Так что в "Терминаторе-4" может играть уже не Шварценеггер, а реальный терминатор.
Кристофер-2003,
[email protected]










